6-DOF Robotic Sketching & 3D Projection
A complete closed-loop robotic drawing system integrating computer vision, analytical IK, and compliant hardware design.
This project implements a complete closed-loop pipeline for high-precision robotic sketching. It bridges the gap between digital image processing and physical hardware execution on both planar and non-planar surfaces.
🎥 Physical Execution (Real-World Demo)
6-DOF manipulator performing continuous-path sketching with consistent stroke quality and passive pressure regulation.
🌐 Advanced Feature: 3D Surface Projection
Non-planar Sketching: Mapping 2D contours onto a cylindrical surface using coordinate transformation and dynamic pose adjustment.
🔍 Vision Pipeline & Final Results

OpenCV-based skeletonization and path node extraction for human figures.

Final sketching outputs showcasing high reconstruction fidelity on paper.
📉 Simulink Simulation & Trajectory Plots
Dynamic simulation in Simscape Multibody to verify kinematic feasibility and joint limits.
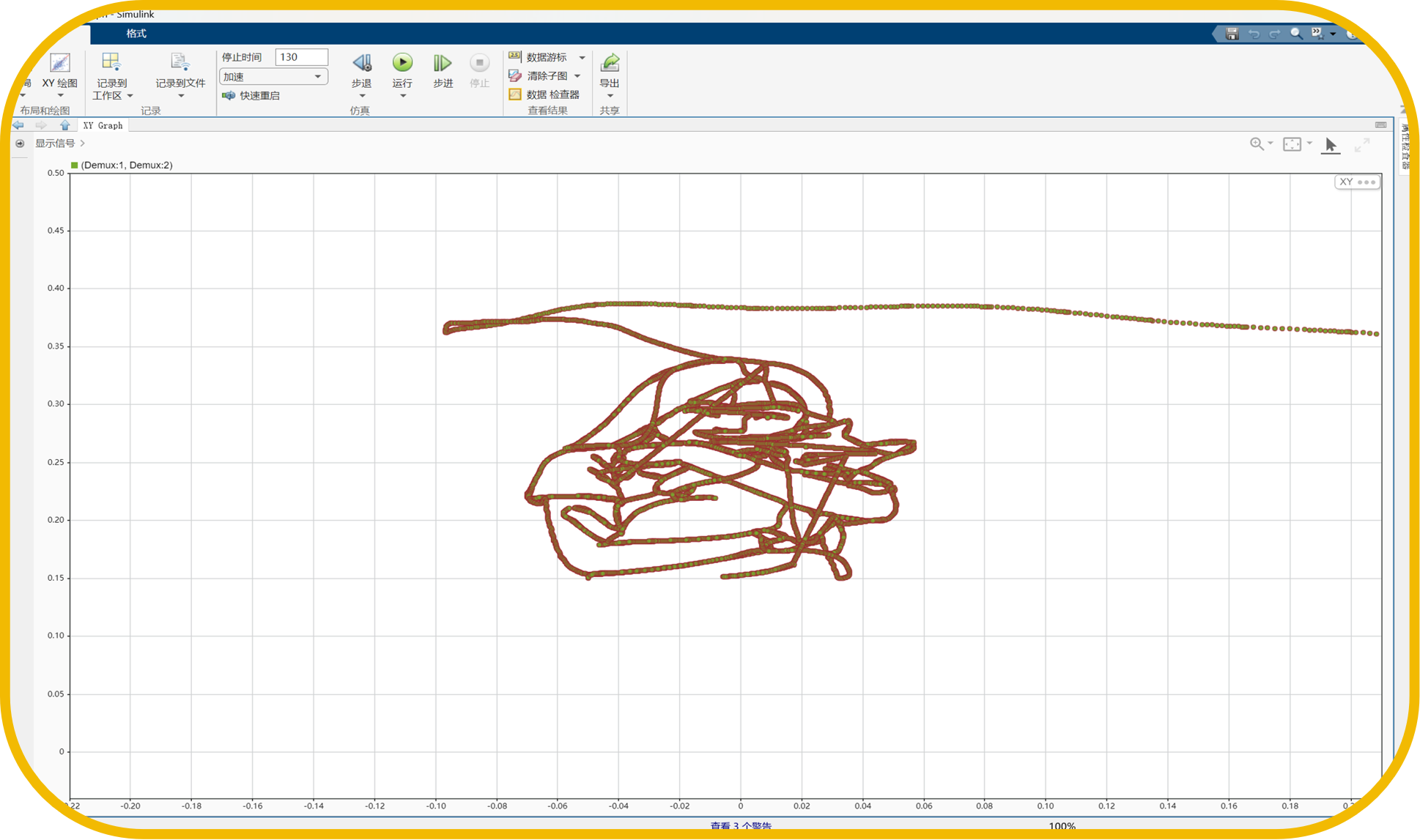
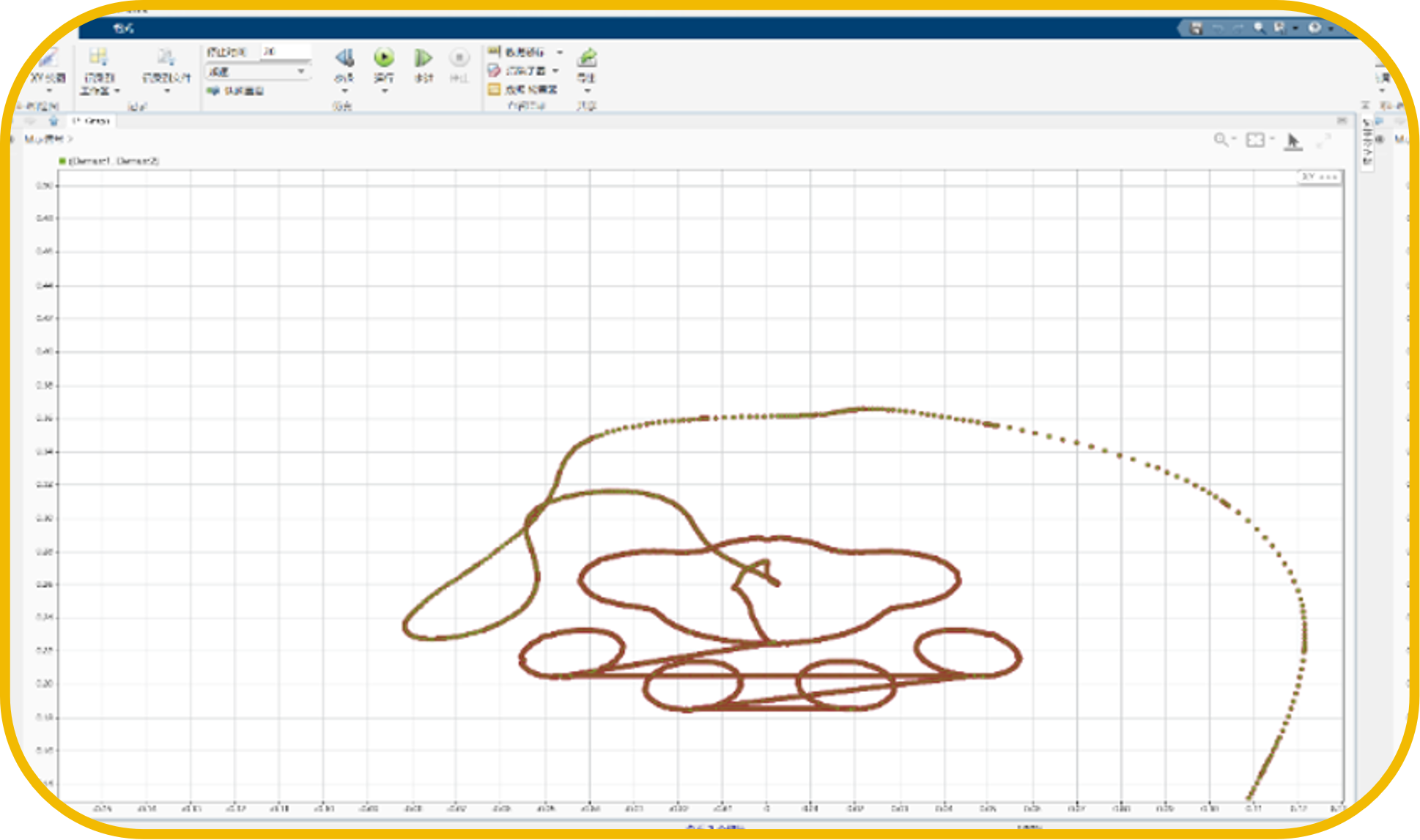
Simulated trajectory data and joint-space movement analysis.
🛠️ Hardware: Compliant Gripper & Setup
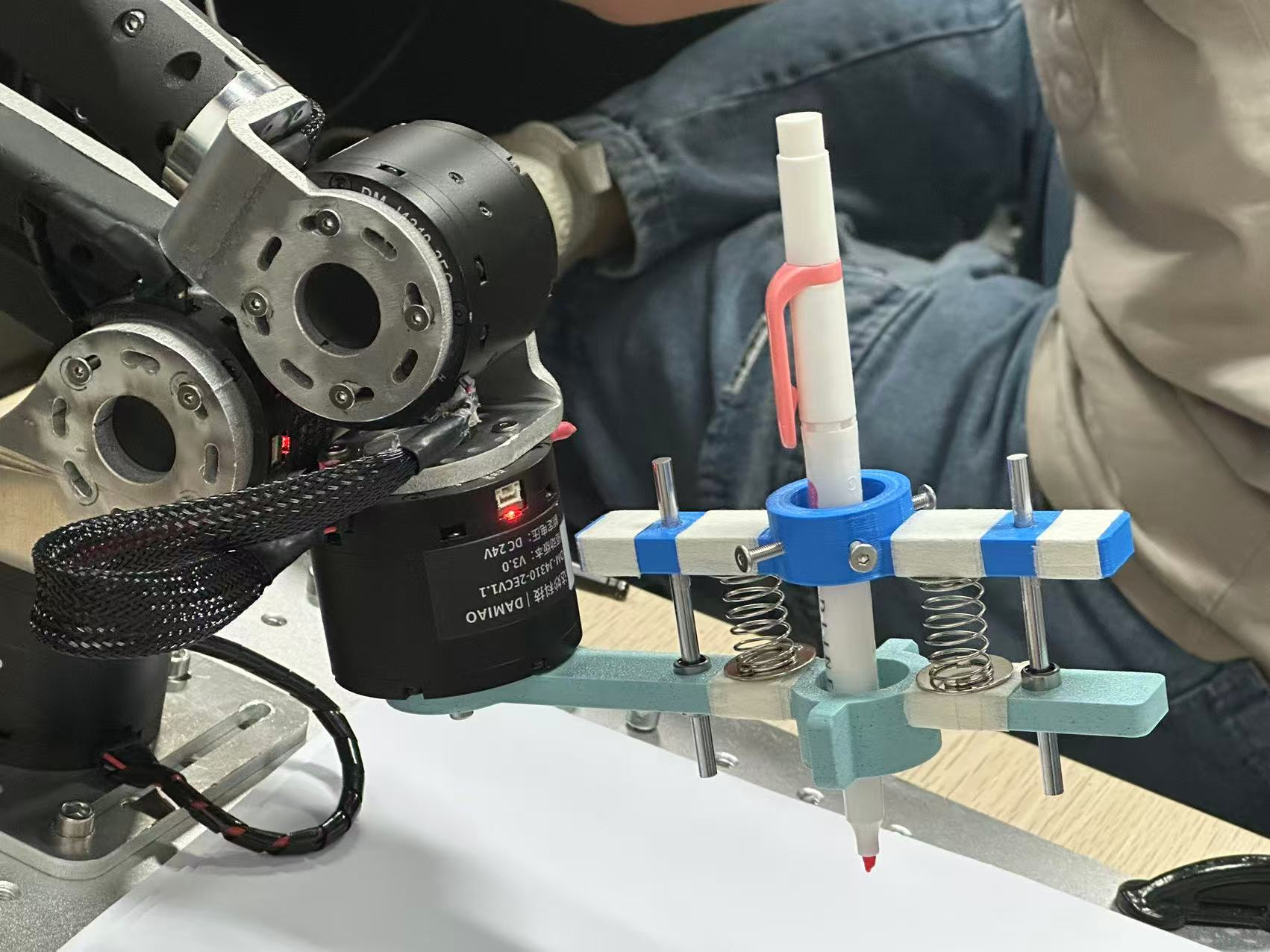
Detailed view of the spring-buffered compliant gripper.

Experimental platform setup and robot workspace.
Physical calibration of the drawing tools.
Technical Highlights
- Compliance Control: The custom 3D-printed gripper provides passive pressure regulation, ensuring line continuity across uneven surfaces.
- IK Solver: Derived and implemented an analytical Inverse Kinematics (IK) solver using D-H parameters in MATLAB.
- Path Optimization: Employed a greedy Euclidean search for optimal waypoint sequencing to minimize air-time and improve drawing efficiency.